[Top][All Lists]
[Date Prev][Date Next][Thread Prev][Thread Next][Date Index][Thread Index]
RE: [Discuss-gnuradio] Why I cannot see a TX pulse and the RX pulse in t
|
From: |
Jorge Miguel |
|
Subject: |
RE: [Discuss-gnuradio] Why I cannot see a TX pulse and the RX pulse in the same oscilloscope in time domain |
|
Date: |
Wed, 13 Oct 2010 10:27:48 +0200 |
Hi,
I think I did not provide enough details.
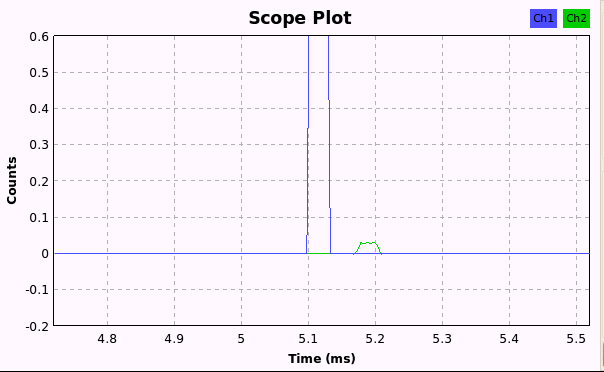
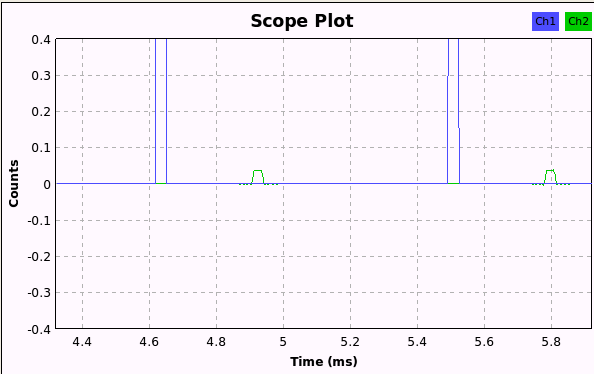
I am using basic TX and basic RX. My idea was to measure delay between the tx pulse and the rx pulse but I cannot because the rx signal is not stable in the oscilloscope. The delay between the signals is random. It can be 0.075 ms, 0.30 ms (see images) sometimes the pulse is even negative!......it doesn't make sense to me.
My GRC file is:
<?xml version='1.0' encoding='ASCII'?>
<flow_graph>
<timestamp>Wed Oct 13 10:03:03 2010</timestamp>
<block>
<key>options</key>
<param>
<key>id</key>
<value>top_block</value>
</param>
<param>
<key>_enabled</key>
<value>True</value>
</param>
<param>
<key>title</key>
<value></value>
</param>
<param>
<key>author</key>
<value></value>
</param>
<param>
<key>description</key>
<value></value>
</param>
<param>
<key>window_size</key>
<value>1280, 1024</value>
</param>
<param>
<key>generate_options</key>
<value>wx_gui</value>
</param>
<param>
<key>category</key>
<value>Custom</value>
</param>
<param>
<key>run</key>
<value>True</value>
</param>
<param>
<key>realtime_scheduling</key>
<value></value>
</param>
<param>
<key>_coordinate</key>
<value>(10, 10)</value>
</param>
<param>
<key>_rotation</key>
<value>0</value>
</param>
</block>
<block>
<key>usrp2_sink_xxxx</key>
<param>
<key>id</key>
<value>usrp2_sink_xxxx_0</value>
</param>
<param>
<key>_enabled</key>
<value>True</value>
</param>
<param>
<key>type</key>
<value>complex</value>
</param>
<param>
<key>interface</key>
<value></value>
</param>
<param>
<key>mac_addr</key>
<value></value>
</param>
<param>
<key>interpolation</key>
<value>500</value>
</param>
<param>
<key>frequency</key>
<value>90000000</value>
</param>
<param>
<key>lo_offset</key>
<value>float('inf')</value>
</param>
<param>
<key>gain</key>
<value>0</value>
</param>
<param>
<key>_coordinate</key>
<value>(1034, 26)</value>
</param>
<param>
<key>_rotation</key>
<value>0</value>
</param>
</block>
<block>
<key>usrp2_source_xxxx</key>
<param>
<key>id</key>
<value>USRP2_source</value>
</param>
<param>
<key>_enabled</key>
<value>True</value>
</param>
<param>
<key>type</key>
<value>complex</value>
</param>
<param>
<key>interface</key>
<value></value>
</param>
<param>
<key>mac_addr</key>
<value></value>
</param>
<param>
<key>decimation</key>
<value>500</value>
</param>
<param>
<key>frequency</key>
<value>90000000</value>
</param>
<param>
<key>lo_offset</key>
<value>float('inf')</value>
</param>
<param>
<key>gain</key>
<value>0</value>
</param>
<param>
<key>_coordinate</key>
<value>(209, 208)</value>
</param>
<param>
<key>_rotation</key>
<value>0</value>
</param>
</block>
<block>
<key>gr_null_sink</key>
<param>
<key>id</key>
<value>gr_null_sink_0</value>
</param>
<param>
<key>_enabled</key>
<value>True</value>
</param>
<param>
<key>type</key>
<value>float</value>
</param>
<param>
<key>vlen</key>
<value>1</value>
</param>
<param>
<key>_coordinate</key>
<value>(957, 308)</value>
</param>
<param>
<key>_rotation</key>
<value>0</value>
</param>
</block>
<block>
<key>gr_float_to_complex</key>
<param>
<key>id</key>
<value>gr_float_to_complex_0</value>
</param>
<param>
<key>_enabled</key>
<value>True</value>
</param>
<param>
<key>vlen</key>
<value>1</value>
</param>
<param>
<key>_coordinate</key>
<value>(669, 59)</value>
</param>
<param>
<key>_rotation</key>
<value>0</value>
</param>
</block>
<block>
<key>gr_complex_to_float</key>
<param>
<key>id</key>
<value>gr_complex_to_float_0</value>
</param>
<param>
<key>_enabled</key>
<value>True</value>
</param>
<param>
<key>vlen</key>
<value>1</value>
</param>
<param>
<key>_coordinate</key>
<value>(636, 272)</value>
</param>
<param>
<key>_rotation</key>
<value>0</value>
</param>
</block>
<block>
<key>wxgui_scopesink2</key>
<param>
<key>id</key>
<value>wxgui_scopesink2_0_0_0_0</value>
</param>
<param>
<key>_enabled</key>
<value>True</value>
</param>
<param>
<key>type</key>
<value>float</value>
</param>
<param>
<key>title</key>
<value>Scope Plot</value>
</param>
<param>
<key>samp_rate</key>
<value>200000</value>
</param>
<param>
<key>v_scale</key>
<value>0</value>
</param>
<param>
<key>t_scale</key>
<value>0</value>
</param>
<param>
<key>ac_couple</key>
<value>False</value>
</param>
<param>
<key>xy_mode</key>
<value>False</value>
</param>
<param>
<key>num_inputs</key>
<value>2</value>
</param>
<param>
<key>grid_pos</key>
<value>1,1,1,1</value>
</param>
<param>
<key>notebook</key>
<value></value>
</param>
<param>
<key>_coordinate</key>
<value>(863, 151)</value>
</param>
<param>
<key>_rotation</key>
<value>0</value>
</param>
</block>
<block>
<key>gr_vector_source_x</key>
<param>
<key>id</key>
<value>gr_vector_source_x_0</value>
</param>
<param>
<key>_enabled</key>
<value>True</value>
</param>
<param>
<key>type</key>
<value>float</value>
</param>
<param>
<key>vector</key>
<value>1, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0</value>
</param>
<param>
<key>repeat</key>
<value>True</value>
</param>
<param>
<key>vlen</key>
<value>1</value>
</param>
<param>
<key>_coordinate</key>
<value>(205, 124)</value>
</param>
<param>
<key>_rotation</key>
<value>0</value>
</param>
</block>
<block>
<key>gr_throttle</key>
<param>
<key>id</key>
<value>gr_throttle_0</value>
</param>
<param>
<key>_enabled</key>
<value>True</value>
</param>
<param>
<key>type</key>
<value>float</value>
</param>
<param>
<key>samples_per_second</key>
<value>200000</value>
</param>
<param>
<key>vlen</key>
<value>1</value>
</param>
<param>
<key>_coordinate</key>
<value>(428, 165)</value>
</param>
<param>
<key>_rotation</key>
<value>0</value>
</param>
</block>
<connection>
<source_block_id>USRP2_source</source_block_id>
<sink_block_id>gr_complex_to_float_0</sink_block_id>
<source_key>0</source_key>
<sink_key>0</sink_key>
</connection>
<connection>
<source_block_id>gr_float_to_complex_0</source_block_id>
<sink_block_id>usrp2_sink_xxxx_0</sink_block_id>
<source_key>0</source_key>
<sink_key>0</sink_key>
</connection>
<connection>
<source_block_id>gr_complex_to_float_0</source_block_id>
<sink_block_id>gr_null_sink_0</sink_block_id>
<source_key>0</source_key>
<sink_key>0</sink_key>
</connection>
<connection>
<source_block_id>gr_throttle_0</source_block_id>
<sink_block_id>gr_float_to_complex_0</sink_block_id>
<source_key>0</source_key>
<sink_key>0</sink_key>
</connection>
<connection>
<source_block_id>gr_throttle_0</source_block_id>
<sink_block_id>wxgui_scopesink2_0_0_0_0</sink_block_id>
<source_key>0</source_key>
<sink_key>0</sink_key>
</connection>
<connection>
<source_block_id>gr_complex_to_float_0</source_block_id>
<sink_block_id>wxgui_scopesink2_0_0_0_0</sink_block_id>
<source_key>1</source_key>
<sink_key>1</sink_key>
</connection>
<connection>
<source_block_id>gr_vector_source_x_0</source_block_id>
<sink_block_id>gr_throttle_0</sink_block_id>
<source_key>0</source_key>
<sink_key>0</sink_key>
</connection>
</flow_graph>
If it is important, I get a lot of messages like:
usrp2::tx_raw: FIXME: short packet: 7 items (56 bytes)
usrp2::tx_raw: FIXME: short packet: 7 items (56 bytes)
usrp2::tx_raw: FIXME: short packet: 7 items (56 bytes)
Many thanks,
Jorge
>Hello all,
>
>I did some test when transmitting and receiving a
pulse. After seeing the transmitted and received signal on a single
oscilloscope (in GRC).
>
>Flowgraph:
>Vector source - Oscilloscope A - Rational resampler - USRP2 sink (500 interpolation)
>USRP2 source (500 decimation) - Rational resampler - Oscilloscope A - Nule sink
>
>The received pulse signal is not stable (oscilloscope triggered with tx
signal). It is like random phase so that I can not measure the delay
between transmitted and received pulse.
>I expected to have two fix pulsed signals in the oscilloscope at a fixed delay.How can I do it?
>
>Many thanks,
>Jorge.
 0-075ms.png
0-075ms.png
Description: PNG image
0-3ms.png
Description: PNG image
| [Prev in Thread] |
Current Thread |
[Next in Thread] |
- RE: [Discuss-gnuradio] Why I cannot see a TX pulse and the RX pulse in the same oscilloscope in time domain,
Jorge Miguel <=
{kind=link}
{kind=link}