{kind=link}
Description: PNG image
|
| From: | Meelis Nõmm |
| Subject: | [Discuss-gnuradio] Syncronization issues, using a GPSDO |
| Date: | Tue, 24 May 2016 17:37:35 +0300 |
Hello everyone,
I have been working on a positioning implementation and for
that I need very good time synchronization between the USRPs that are geographically
not in the same location. Considered a few possibilities, but decided to test
out the GPSDO modules for the time sync (also provides the needed 10 MHz). In
order to measure the time sync, I’m periodically feeding both USRPs with the
same frequency sweep signal, storing the interesting sections and calculating
the delay between them via correlation.
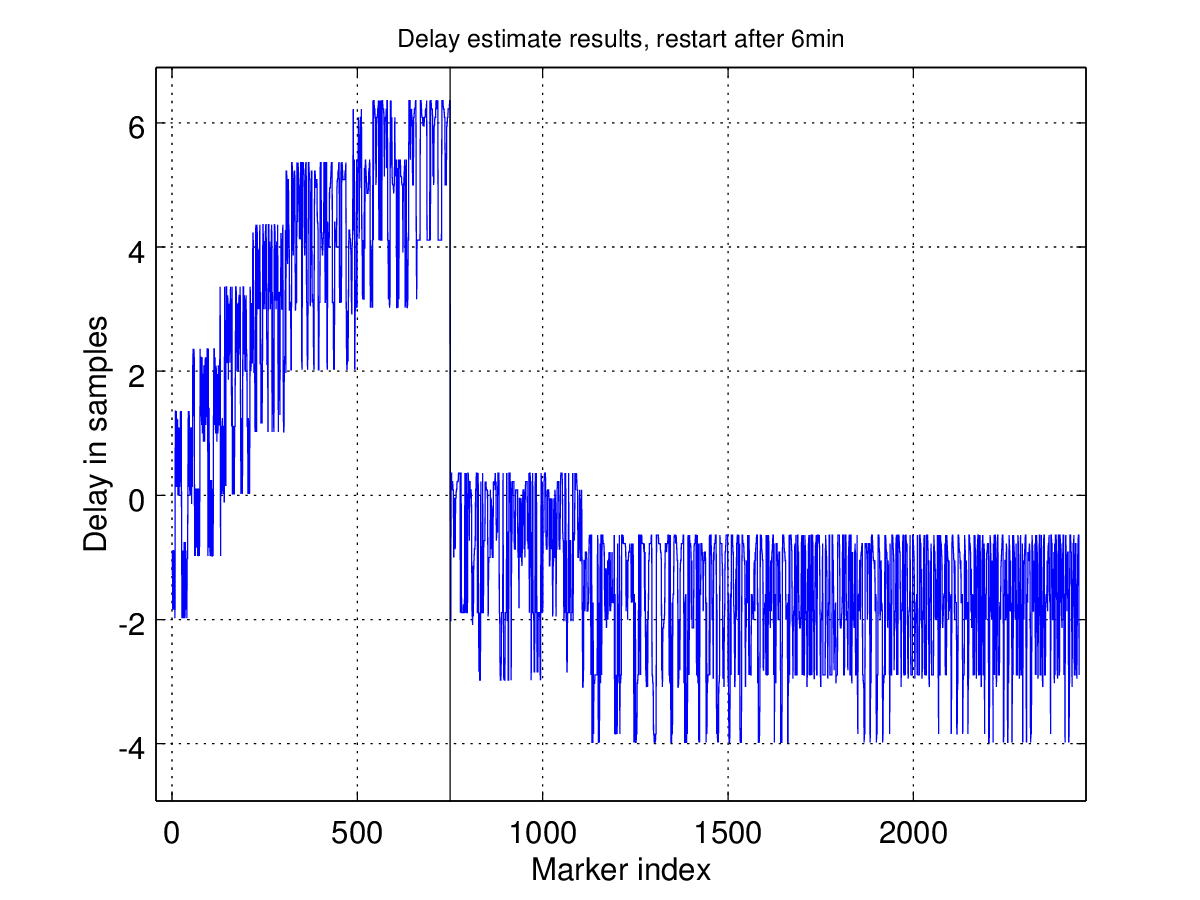
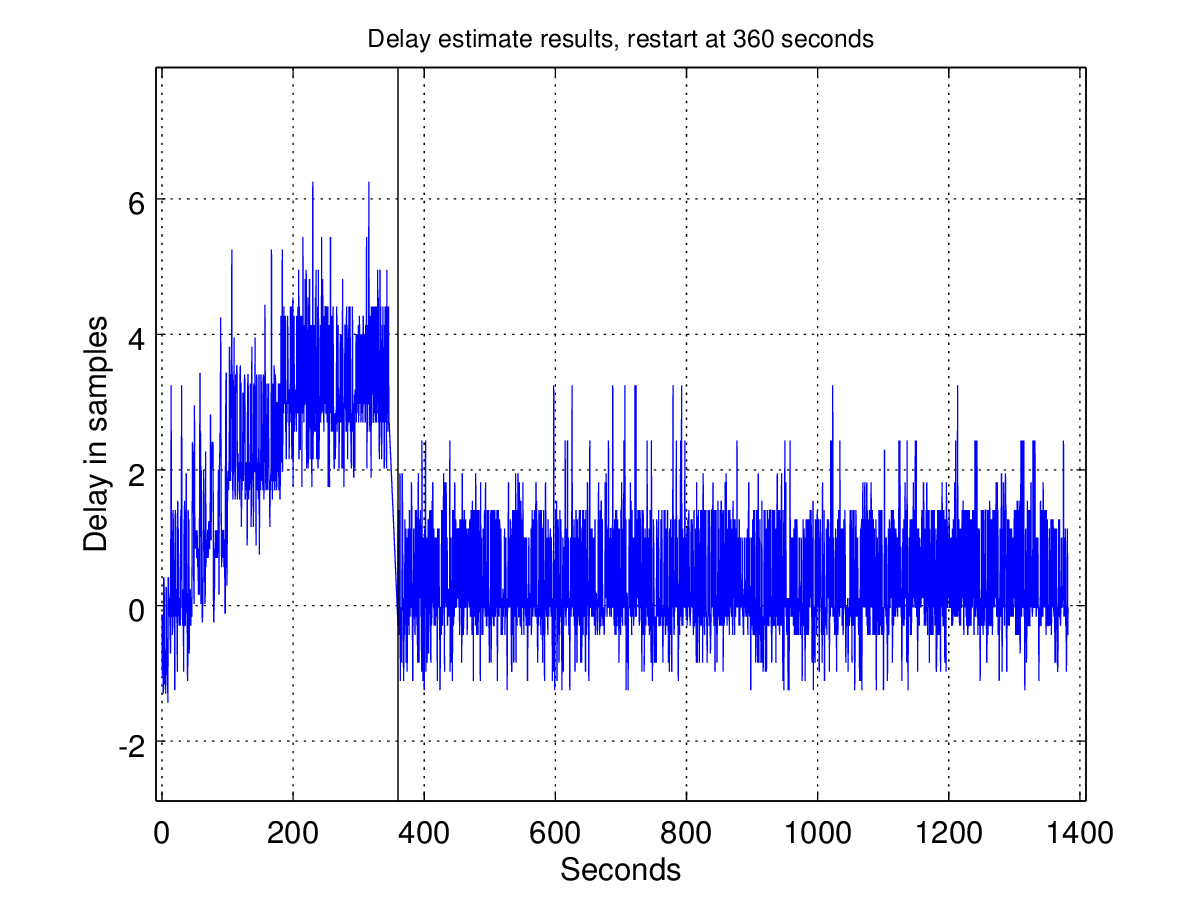
Overall it seems to work, but I’m witnessing an interesting
effect. As I start the program, within the first 4-5 minutes the time delay
between the USRPs increases from (near) 0 to about 4-5 samples (400-500ns, with 10 MSps).
Once this phase is done, the delay between the USRPs stabilizes and the two
seem to be quite well synchronized. I have attached delay plots from 2
different runs (this behavior I can reproduce every time). If I restart the python program after the “warmup”
phase, the delay is very well restricted and clocks seem well synchronized
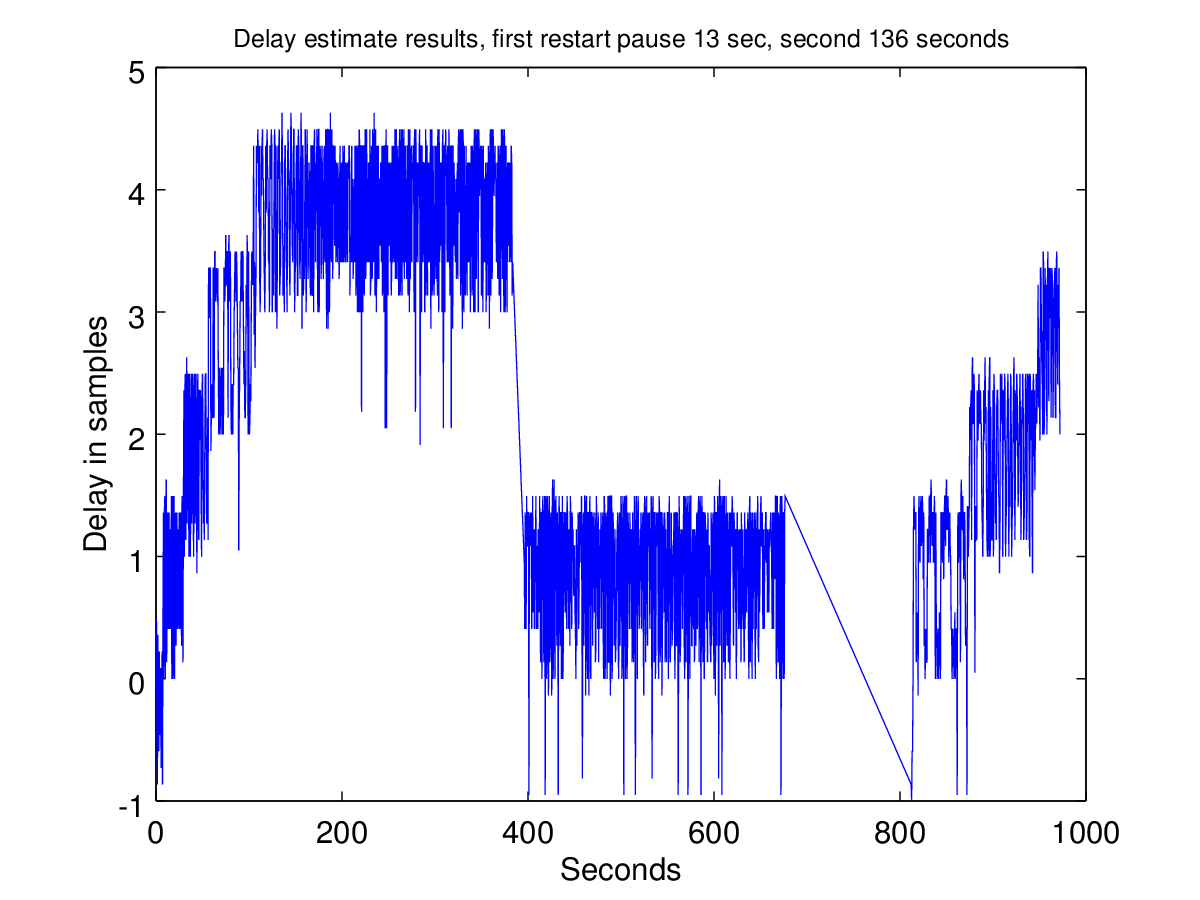
(restart is denoted by the vertical line). It is also worth pointing out that
the pause between the restarts is short (around 15 seconds), if I make the
pause longer (more than 60 seconds or so) the results again exhibit a “warmup” phase (figure "delays_result65_1"), but usually a bit less emphasized.
Would like to know what causes this effect? It does not seem to come from the USRP clock sync python code (relevant code given below), as after the fast restart the effect is not present. Right now to me, it seems that in the GPSDO, or in the FPGA clock sync, a certain (lock) “warmup” phase is done, once the FPGA starts to use the 10 MHz output. If the program is restarted fast enough, the clocks are still in sync, but if the pause is long enough the clock sync process(es) can be seen again?
Any
thoughts?
Meelis
##Setup UHD Source##
self.uhd_src = uhd.usrp_source(
device_addr=self.uhd_addr,
stream_args=uhd.stream_args('fc32')
)
#Should be redundant for N2xx with internal module, but just to be safe
self.uhd_src.set_clock_source("gpsdo")
self.uhd_src.set_time_source("gpsdo")
print "Checking if GPSDO locked"
while(not self.uhd_src.get_mboard_sensor("gps_locked").to_bool()):
time.sleep(0.1)
time.sleep(0.2)
print "GPS Locked , bool = ", self.uhd_src.get_mboard_sensor("gps_locked").to_bool()
print "Checking if ref locked"
while(not self.uhd_src.get_mboard_sensor("ref_locked").to_bool()):
time.sleep(0.1)
time.sleep(0.2)
print "10 MHz Locked , bool = ", self.uhd_src.get_mboard_sensor("ref_locked").to_bool()
t = self.uhd_src.get_time_last_pps()
while (t == self.uhd_src.get_time_last_pps()):
pass
#Set the time from the GPS time
gps_time = self.uhd_src.get_mboard_sensor("gps_time").to_int()
self.uhd_src.set_time_next_pps(uhd.time_spec(gps_time+1))
#This sleep is recomended to stabilize the clocks
time.sleep(1)
##Initialization and connecting
#Set the start time
self.uhd_src.set_start_time(uhd.time_spec(gps_time + 3))
![]() delays_result64_8_bias.png
delays_result64_8_bias.png
Description: PNG image
![]() delays_result64_9_bias_in_seconds.png
delays_result64_9_bias_in_seconds.png
Description: PNG image
![]() delays_result65_1_bias_in_seconds.png
delays_result65_1_bias_in_seconds.png
Description: PNG image
| [Prev in Thread] | Current Thread | [Next in Thread] |
{kind=link}
{kind=link}