[Top][All Lists]
[Date Prev][Date Next][Thread Prev][Thread Next][Date Index][Thread Index]
Re: [Discuss-gnuradio] GPS with DBSRX, Almost There
|
From: |
Peter Monta |
|
Subject: |
Re: [Discuss-gnuradio] GPS with DBSRX, Almost There |
|
Date: |
Tue, 06 Mar 2007 23:32:05 -0800 |
|
User-agent: |
Thunderbird 1.5.0.9 (X11/20070212) |
Gregory W Heckler wrote:
The real problem lies in the fact that the carrier tracking loop (a
3rd order PLL) of my software receiver cannot achieve phase lock. The
phase jitter looks high, and the LO frequency drifts so much it
dominates over the Doppler derived from satellite motion.
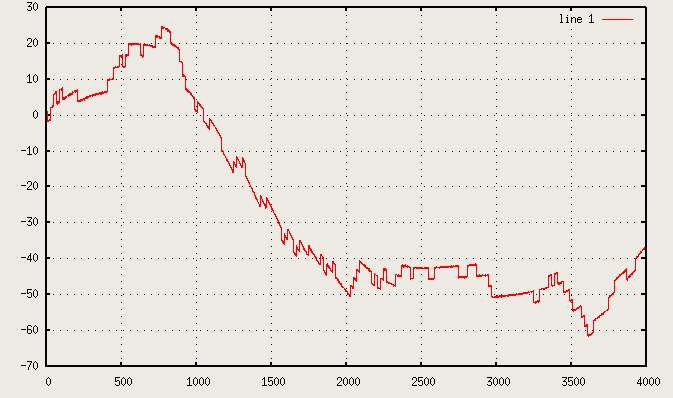
Yes, it looks like my dbs_rx is wandering 10 Hz or so over timescales
of a few seconds. A second-order loop with bandwidth of about 20 Hz
seems to track all this out, but at the expense of noise---it would be
nice to use a smaller bandwidth for a stationary receiver.
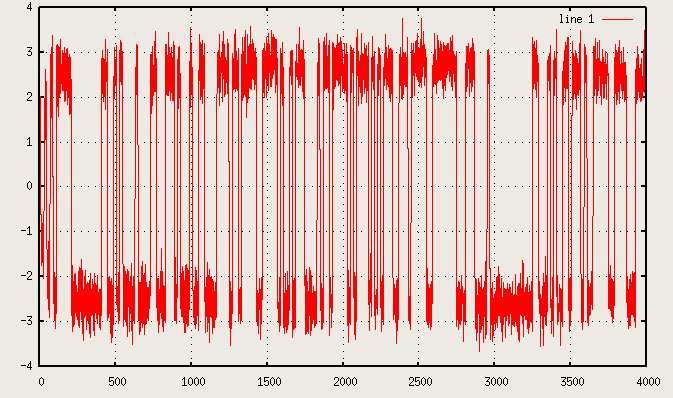
Below are plots of 4 seconds of an actual dbs_rx recording (one point
per millisecond). The first plot is unwrapped phase (y-axis in radians)
and the second is the demodulated data after the PLL (also attached as an
octave/matlab file).
So things look reasonably okay for strong L1 signals, but there may
be limits to how far the dbs_rx can be pushed for weak signals, if
cycle slips are at all important. Maybe the strong PRNs can aid the
weak ones, since the LO jitter is common to all.
If anyone would like any GPS IF data I would be happy to email it to
your personal email address (indicate how many seconds of data you
would like). Thanks!
I could take a look if you like---two seconds perhaps?
Cheers,
Peter Monta
n = length(e);
r = 0;
phase = 0;
freq = 0;
data = zeros(1,n);
for i=1:n,
pd = exp((1j)*phase) * e(i); # phase detector
data(i) = real(pd); # save data (in-phase arm)
err = -arg(pd);
if (err>pi/2), # costas discriminator
err = err - pi;
endif
if (err<(-pi/2)),
err = err + pi;
endif
r = r + 0.0006*err; # loop filter
freq = r + 0.03*err;
phase = phase + freq; # NCO
end
- Re: [Discuss-gnuradio] GPS with DBSRX, Almost There, (continued)
- Re: [Discuss-gnuradio] GPS with DBSRX, Almost There, Trond Danielsen, 2007/03/06
- Re: [Discuss-gnuradio] GPS with DBSRX, Almost There, Martin Dvh, 2007/03/06
- Re: [Discuss-gnuradio] GPS with DBSRX, Almost There, Peter Monta, 2007/03/07
- Re: [Discuss-gnuradio] GPS with DBSRX, Almost There, Matt Ettus, 2007/03/07
- Re: [Discuss-gnuradio] GPS with DBSRX, Almost There, Gregory W Heckler, 2007/03/07
- Re: [Discuss-gnuradio] GPS with DBSRX, Almost There, Marcus Leech, 2007/03/07
- Re: [Discuss-gnuradio] GPS with DBSRX, Almost There, Robert McGwier, 2007/03/07
- Re: [Discuss-gnuradio] GPS with DBSRX, Almost There, Marcus Leech, 2007/03/07
Re: [Discuss-gnuradio] GPS with DBSRX, Almost There,
Peter Monta <=
Re: [Discuss-gnuradio] GPS with DBSRX, Almost There, Matt Ettus, 2007/03/07